Neural Network Based Modelling and Control of Quadrotor
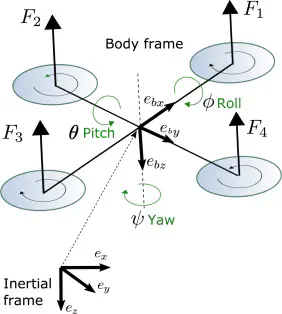 Frame of reference for Quadrotors
Frame of reference for Quadrotors
Details
This project was done as an undergraduate project, in the Spring ‘18 term at IIT Kanpur under Prof. Indranil Saha, Department of Computer Science and Engineering, IIT Kanpur.
Brief summary of the work done in the project
The physics-based models of the quadrotors are being used for a long time to synthesize their controllers. All such controllers work with the linearized model of quadrotor, thus becoming prone to errors in adverse situations because, in reality, the quadrotor models are non-linear.
Recent advancements in deep learning techniques have shown that these tech- niques are very efficient in learning non-linear functions. This motivates us to use them for learning the model of a quadrotor. This project aims at using neural network techniques to learn the model of the quadrotor and to use them for syn- thesizing a controller for it.
Attributions:
- Image source: Analysis and design of second-order sliding-mode algorithms for quadrotor roll and pitch estimation by Chang et al.
Mrinaal Dogra
MS in Computer Science
My research interests include Agentic AI, Large Language Models (LLMs), Reinforcement Learning, and Human-Machine Interaction.